智能机器人教育平台
以机器人工控机为载体,围绕智能操作系统,形成完整的智能机器人生态,辐射教育、工业、医疗等多个产业
电机控制系统教学平台
开发环境友好
- 基于 MATLAB/Simulink
- 多层次API接口
仿真
- 支持离线仿真
- 支持伺服算法的测试评估

- 电机控制系统教学平台
- 控制模型操作平台
- 配置目标机
- 高速总线接口板卡
- 功率驱动板
- 目标电机与负载电机
- SSS-01
- 8GB X86 主机
- 8GB X86 主机
- Kinect 7 FPGA
- Varedan 线性驱动器
- 松下伺服电机
工业机器人教学实验平台
以三、四、六或七自由度机械臂为被控对象的教学实验平台
机器人基础课程教学
三、四、六或七自由度机械臂
主要包括串联机械臂、机器人运动控制、末端操作工具、开发PC机。能够实现正/逆运动学解算、轨迹的规划与插补、动力学解算与动力学参数辨识等教学实验
- 基于Matlab/Simulink的动态数学模型
- 高度集成的机器人编译环境
- 涵盖机器人基础理论和高级理论的控制算法库
- 机器人机械系统认识实验
- 机器人控制系统认识实验
- 机器人操作实验
- 机器人示教编程与再现控制实验
- 机器人工作空间的位姿描述
- 机器人正/逆运动学分析与求解
- 机器人关机空间轨迹的规划
- 机器人笛卡尔空间规划与插补
- 机器人雅可比矩阵
- 机器人动力学分析与求解
- 机器人动力学参数辨识
- ……
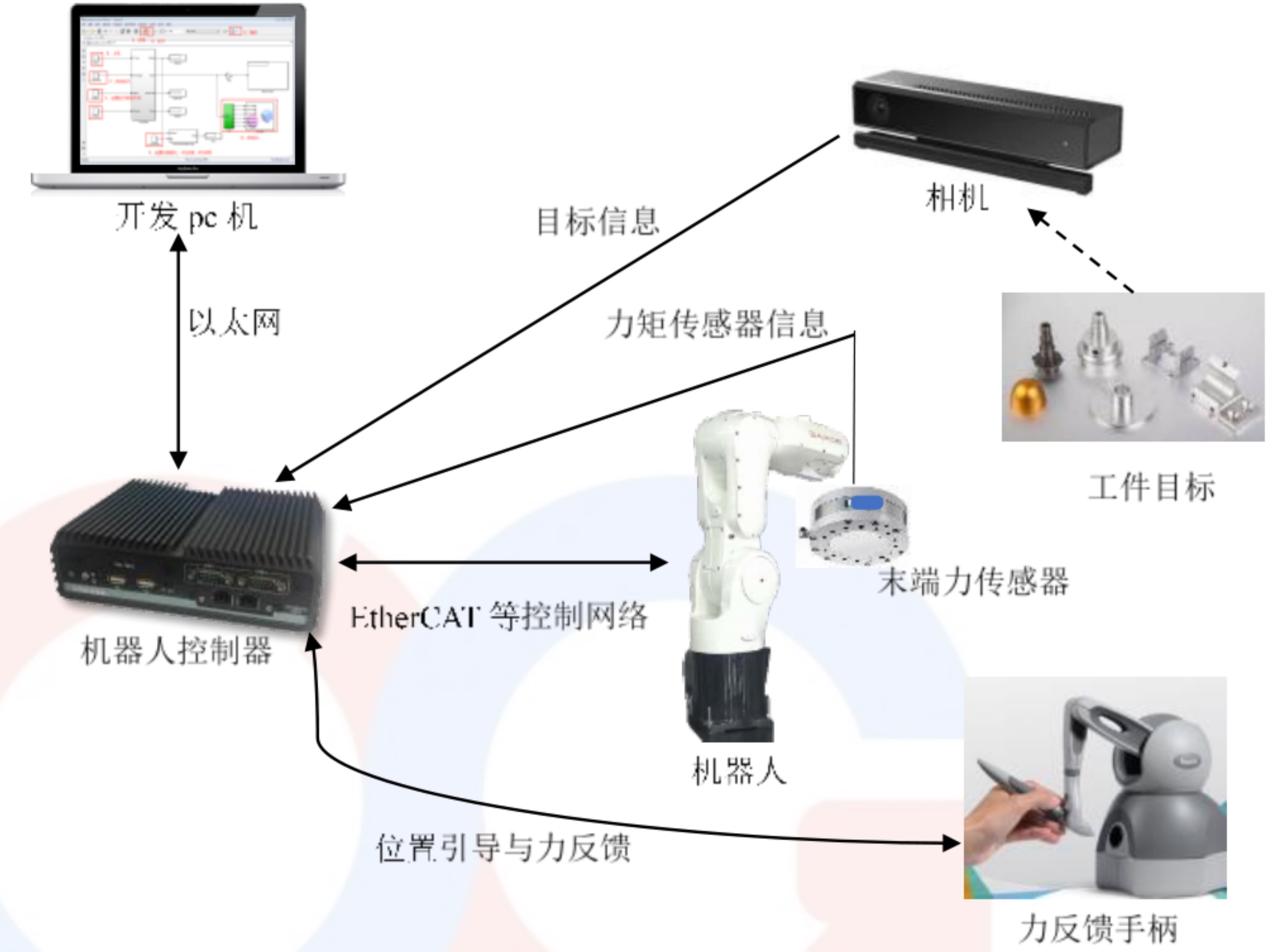
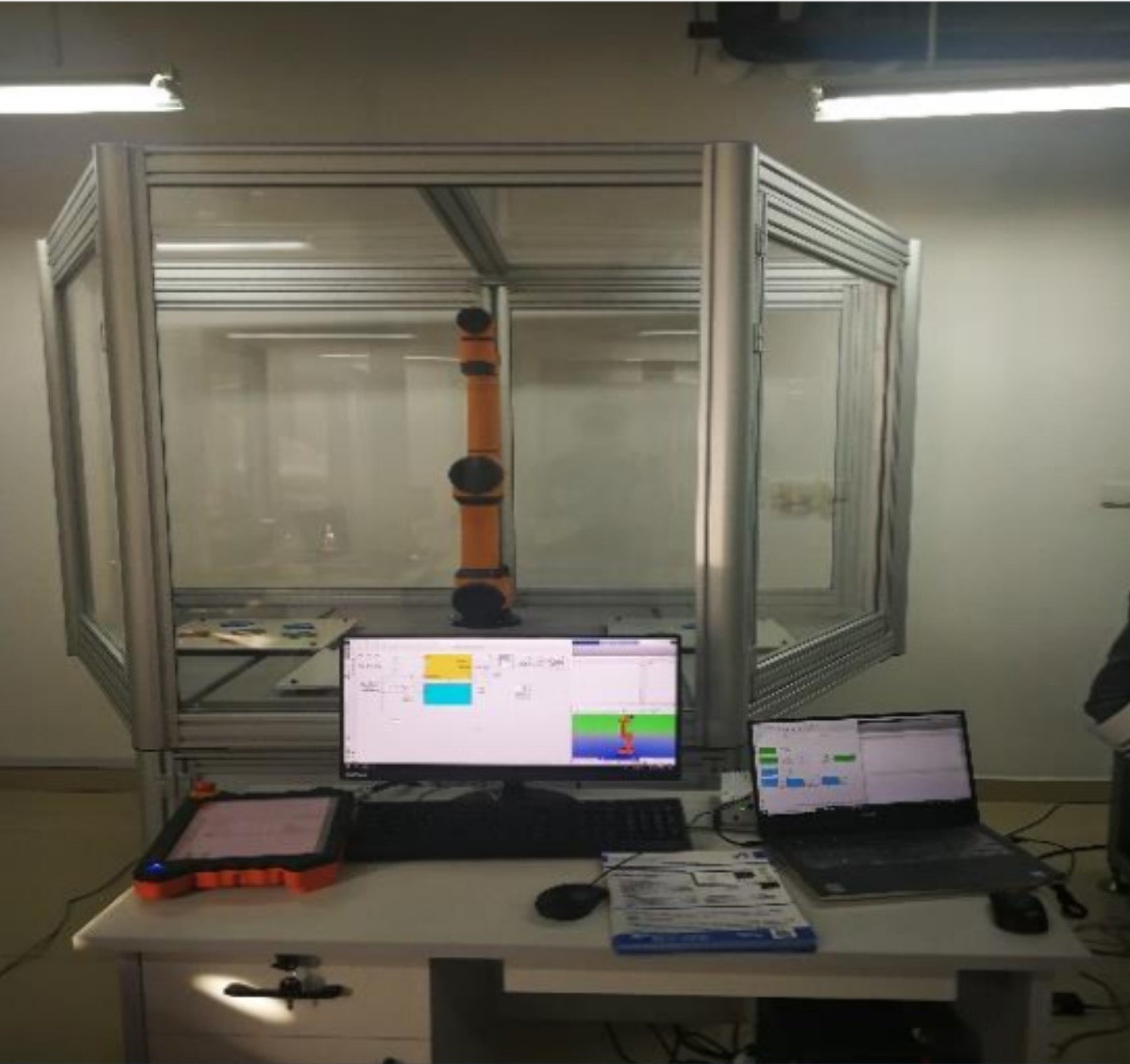
机器人高级课程
三、四、六或七自由度机械臂
主要包括串联机械臂、机器人运动控制器、图像采集及处理装置、末端力传感系统、力反馈系统、末端操作工具、开发PC机。能够实现目标图像识别及目标跟踪、基于动力学的控制、基于末端力传感器感知等实验
- 支持多种操作臂
- 多层次开发接口
- 离线算法仿真
- 机器人视觉认识实验
- 机器人视觉相机标定实验
- 机器人图像坐标系到世界坐标系的变换
- 机器人视觉手眼标定
- 机器人视觉引导抓取
- 机器人的PID控制
- 机器人的计算力矩控制
- 机器人的拖动示教
- 基于末端力矩传感器的力感知实验
- 基于力反馈手柄的机器人控制实验
- 基于末端力矩传感器及力反馈手柄的联合实验
- ……
- 机器人基础课程教学平台
- 机器人实验操作台
- 工业机器人
- 机器人应用开发工具
- 机器人控制系统
- 吸盘/夹爪(可选)
- RBP-01
- Robot-TestBench
- UR5
- CPS Builder
- RoboBrain
- 定制
- 机器人高级课程教学平台
- 机器人实验操作台
- 工业机器人
- 机器人应用开发工具
- 机器人控制系统
- 多维力传感器
- RAP-01
- Robot-TestBench
- XB4
- CPS Builder
- RoboBrain
- Torque Sensor

移动机器人教学实验平台
- 基于 MATLAB/Simulink
- 多层次API接口
- 多样化的调试手段
- 支持离线仿真
- 支持伺服算法的测试评估
- 移动机器人机械系统认识实验
- 移动机器人控制系统认识实验
- 移动机器人基本操作实验
- 移动机器人位置描述
- 移动机器人运动学分析与求解
- 移动机器人运动学分析与求解
- 移动机器人的运动控制
- 移动机器人相关传感器
- 移动机器人环境地图构建
- 移动机器人的定位
- 移动机器人的 SLAM
- 移动机器人的路径规划
- 移动机器人的避障
- ……
- 机器人高级课程教学平台
- 机器人实验操作台
- 工业机器人
- 机器人应用开发工具
- 机器人控制系统
- 多维力传感器
- RAP-01
- Robot-TestBench
- XB4
- CPS Builder
- RoboBrain
- Torque Sensor
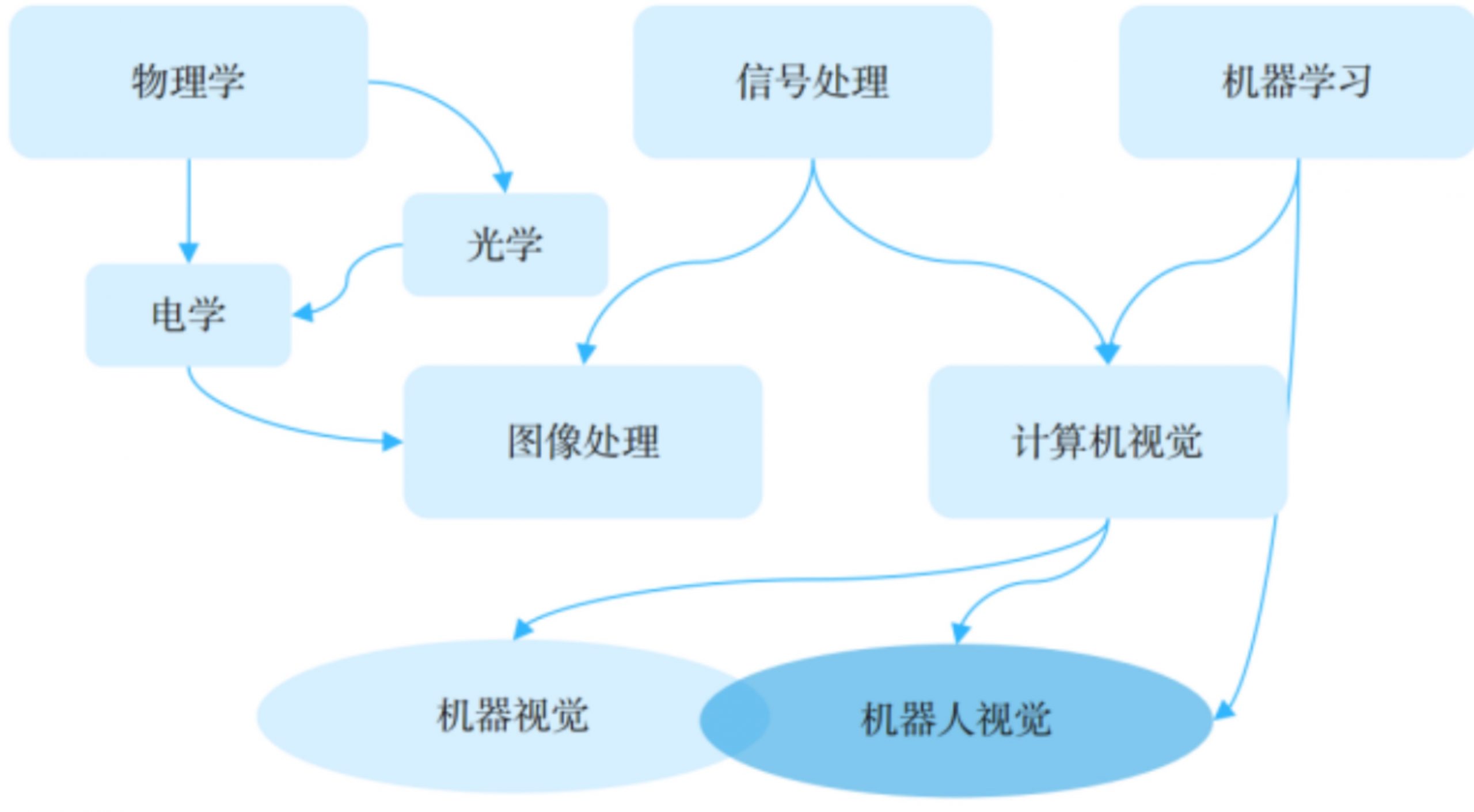
机器人视觉研究及实验平台
- 支持MATLAB/Simulink
- 支持ROS
- 机械臂视觉引导方案
- 定制化机械臂末端工具
- 图像原理认识实验
- 图像增强实验
- 图像分割实验
- 形态学处理实验
- 三维图像处理(深度图、点云)
- 图像坐标系到世界坐标系的转换实验
- 手眼标定实验
- 机器人视觉系统应用
- ……
- 机器人视觉教学平台
- 机器人视觉实验操作台
- 工业机器人
- 视觉传感器
- 机器人控制系统
- 吸盘/夹爪(可选)
- RBV-01
- RobotVision- TestBench
- UR5
- Kinect2
- RoboBrain
- 定制